 Mixing
Mixing
景深
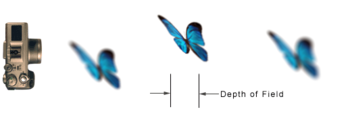
指的是相机对焦点前后相对清晰的成像范围。在景深之內的影像比較清楚,在這個範圍之前或是之後的影像則比較模糊。
景深(英语:Depth of field, DOF)景深是指相机对焦点前后相对清晰的成像范围。在光學中,尤其是錄影或是攝影,是一個描述在空間中,可以清楚成像的距離範圍。雖然透鏡只能夠將光聚到某一固定的距離,遠離此點則會逐漸模糊,但是在某一段特定的距離內,影像模糊的程度是肉眼無法察覺的,這段距離稱之為景深。當焦點設在超焦距处時,景深會從超焦距的一半延伸到無限遠,對一個固定的光圈值來說,這是最大的景深。
景深通常由物距、鏡頭焦距,以及鏡頭的光圈值所決定(相對於焦距的光圈大小)。除了在近距離時,一般來說景深是由物體的放大率以及透鏡的光圈值決定。固定光圈值時,增加放大率,不論是更靠近拍攝物或是使用長焦距的鏡頭,都會減少景深的距離;減少放大率時,則會增加景深。如果固定放大率時,增加光圈值(縮小光圈)則會增加景深;減小光圈值(增大光圈)則會減少景深。
對於某些影像,例如風景照,比較適合用較大的景深,然而在人像攝影時,則經常使用小景深來構圖,造成所谓背景虚化的效果。因為數位影像的進步,影像的銳利度可以由電腦後製而改變,因此也可以由後製的方式來改變景深。
目录
1 感光元件尺寸与景深的关系
2 相机运动和景深的关系
2.1 景深标尺
2.2 超焦距
2.3 红点摄影
3 有限景深:选择对焦
4 模糊圈
5 景深公式
5.1 超焦距
5.2 景深的准确公式
5.3 前景和背景虚化
6 範例
7 外部連結
8 參考文獻
感光元件尺寸与景深的关系
在等效焦距、等效光圈、对焦距离三者相同的条件下,不同尺寸的感光元件景深保持一致。其中焦距和等效焦距、光圈和等效光圈的换算普遍以135传感器为标准。
相机运动和景深的关系
景深标尺

景深表,下面调节光圈,上面有对应的景深,光圈数值的颜色对应对焦环上的景深刻度颜色。例如把光圈调为黄色的11,对应的景深就是上方两条黄色刻线中间的部分,用米和英尺两种单位表示

Tessina 相机的景深标尺
大部分相机的景深标尺都刻在镜头上(例如下图所示的35mm镜头)都配备了根据焦距和光圈值换算景深的景深标尺。景深标尺中使用英尺和米两种单位;当某个距离值对准白色标线時,这一距离的物体就恰好在焦平面上成像。景深表下方白色标线两侧有标示光圈值的数值,当镜头的光圈值设定为某一数值时,景深就为该光圈值标线对齐的距离标尺上的两个数值范围。
也有一些相机,景深标尺不在镜头上,而在控制焦距的旋扭上,例如Rolleiflex 双反相机,和微型相机特熙纳,标尺都在旋钮上
超焦距
当景深被扩大到无穷远时从焦点到镜头中心的距离即是超焦距;通过将相机对焦在超焦距上来获得给定f值的最大景深。对焦超过超焦距并不会使远景深增加(因为它已经被扩展到了无穷远),但这样却会缩短近景深,进而使完整的景深缩小。所以一些摄影师认为这样做会浪费景深;然而,The object field method 给出一个这样做的理由。如果镜头包含景深刻度,那么可以通过对齐无限远标志和某个f值的标志来设置超焦距。例如,将上图中的35mm镜头设置到f/11处,即将无限远标志与‘11’标志对齐就可以将焦距设成超焦距。对焦在超焦距上是一个将对焦区在远景深上延伸至无限远的特例。
红点摄影
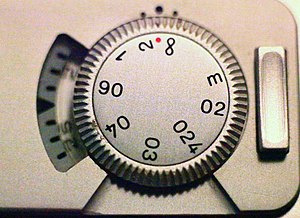
美乐时 LX 型相机的超焦距红点

蔡司Contessa相机的超焦距红字
有一些相机将超焦距表为红字或红点.例如美乐时 LX 型相机的对焦盘上,在2M与无穷远之间有一红点,将镜头对准红点,则景深由米延伸到无穷远。又如蔡司Contessa相机镜头上20英尺表为红字,光圈8也表为红字,表示当光圈设F8
镜头对20英尺,则景深由10米至无穷远。
有限景深:选择对焦
要获得有限景深的照片,其目的是获得小景深的照片,因此要选择大光圈。
模糊圈

光圈對景深以及模糊圈的影響。焦點 (2) 可以在像平面 (5)成像,但是在不同距離的點,如 (1 跟 3)則會投影出一個模糊的點,此點已大於模糊圈。減少光圈的大小 (4) 可以減小那些不在焦點上的點的模糊圈大小,因此模糊就變的比較不易察覺,看起來這些點就變成都在景深內
当镜头准确对焦时一个物体,一个点光源在像平面上成像为一个点(不考虑光的衍射);而在此物体前后的点光源在像平面上显示为圆斑。偏离准确对焦位置越多的点光,像平面上的圆斑越大,大过一定程度,人眼看去就显得模糊,这个圆斑限度就是模糊圈。人眼观看一张在明视距离25厘米的照片,可以分辨出不小于1/4毫米的圆斑;如果这张照片是一张从35毫米底片放大的8x10英寸照片,放大倍数为8,那么在底片上与放大照片上0.25毫米像对应的班的直径为[1]
c= 18∗4≈130{displaystyle {frac {1}{8*4}}approx {frac {1}{30}}}毫米
这就是一般35毫米相机取 模糊圈为1/30 毫米的由来。
如果35毫米底片放大16倍,即 16 X 20 吋,而观看距离增加到 50厘米,模糊圈仍保持 1/30 毫米。
对于其他像幅,模糊圈做相应的改变
例一: 6 X 6 厘米相机
放大 8 吋照片,放大倍数=3.4 模糊圈 = 1/(3.4 x 4) ~ 1/14 毫米
例二:14x21毫米像幅微型相机
放大8吋照片,放大倍数为 15倍;所以模糊圈 c= 1/60 毫米
景深公式
超焦距
f{displaystyle f}


模糊圈的直徑,超焦距為H{displaystyle H}
- H=f+f2Nc{displaystyle H=f+{frac {f^{2}}{Nc}}}

景深的准确公式

景深图
維基教科書中的相關電子教程:准确的景深公式 |
景深公式依据下列6个关系式
1) 光圈的直径 d = fN{displaystyle {frac {f}{N}}}
其中 F 为镜头的焦距, N代表 镜头设定的光圈数(2.8,4,5.6,8,11,16,22等)。

2)光学透镜成像公式
1s+1v=1f{displaystyle {frac {1}{s}}+{frac {1}{v}}={frac {1}{f}}}
其中v代表像距,s代表物距

3)后物体的成像公式:
1DN+1vN=1f{displaystyle {frac {1}{D_{N}}}+{frac {1}{v_{N}}}={frac {1}{f}}}

4) 前物体的成像:
1DF+1vF=1f{displaystyle {frac {1}{D_{F}}}+{frac {1}{v_{F}}}={frac {1}{f}}}

5) vN−vvN=cd{displaystyle {frac {v_{N}-v}{v_{N}}}={frac {c}{d}}}

6)v−vFvF=cd{displaystyle {frac {v-v_{F}}{v_{F}}}={frac {c}{d}}}

从这6个关系式组成的连立方程, 利用逐次消元法,可以不作任何简化,就得到
DN=sf2f2−cNf+cNs{displaystyle D_{N}={frac {sf^{2}}{f^{2}-cNf+cNs}}}

DF=sf2f2+cNf−cNs{displaystyle D_{F}={frac {sf^{2}}{f^{2}+cNf-cNs}}}

令DF{displaystyle D_{F}}
s=H=f+f2Nc{displaystyle s=H=f+{frac {f^{2}}{Nc}}}
将超焦距公式代入DF{displaystyle D_{F}}
DF=s(H−f)H−s{displaystyle D_{F}={frac {s(H-f)}{H-s}}}

DN=s(H−f)H−2f+s{displaystyle D_{N}={frac {s(H-f)}{H-2f+s}}}

此二公式,对于中长距离和近距离一律适用
例: 镜头对焦于s=H, 代入上列二式得
DN=H∗(H−f)2H−2f=H2{displaystyle D_{N}={frac {H*(H-f)}{2H-2f}}={frac {H}{2}}}

DF=H∗(H−f)0{displaystyle D_{F}={frac {H*(H-f)}{0}}}
前景和背景虚化
在焦点前的虚化一般叫前景虚化。相应的,在焦点后的叫背景虚化。
範例

f/22

f/8

f/4

f/2.8

在f/32,背景很清楚

在f/5.6,光圈開大,使背景模糊,讓花與背景分離

f/2.8,利用淺景深主題貓也與背景分離

使用非常淺景深的微距鏡頭








外部連結
- 景深計算器
參考文獻
^ Harold Merklingger, The INs and OUTs of FOCUS, p13 Seaboard Printing Limited, Nova Scotia, ISBN 0-9695025-0-8
^ Harold Merklinger, p14
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||



Comments
Post a Comment