 Mixing
Mixing
运动规划
运动规划(英语:Motion Planning)是一个过程,用来寻找从起始状态到目标状态的移动步骤。运动规划常常需要在运动受到约束的条件下找到最优解。运动规划多用于机器人学。
例如,一个清洁机器人在楼层里打扫卫生,它不能撞墙,也不能从楼梯口掉下去。给定一个任务,运动规划算法计算出一个动作序列,告诉机器人前进多少米,然后左转右转多少度。如果机器人要操作物品或者探测未知地形等等,运动规划就变得很复杂了。
除了机器人学,运动规划在计算机游戏里也用来模拟人物或车辆的运动。
概念
机器人所在的世界(英语:workspace)
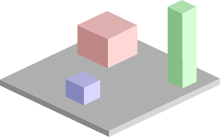
基本的运动规划问题是通过连续的动作从起始位形s到达目标位形g,并且过程中要避开障碍物。机器人和障碍物可以抽象为二维或三维的几何图形,动作则被表示为位形空间中的路径。
自由空间
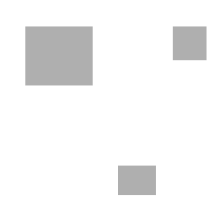
将世界抽象为位形空间,灰色区域表示障碍物,白色区域为自由空间(Cfree{displaystyle C_{free}}
 )。
)。如果机器人采用某个位形时不会碰到障碍物,那么这个位形属于自由位形空间,简称自由空间(英文写作Cfree{displaystyle C_{free}}
测试一个位形是否属于自由空间是简单的。先用正向运动学确定机器人的轮廓,然后查看机器人是否与障碍物碰撞。
算法
低维度的运动规划问题可以用基于格点的算法求解,如A*算法。



Comments
Post a Comment