 Mixing
Mixing
太空會合

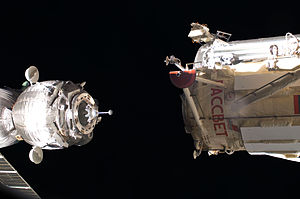
1965年從雙子星6號太空船拍攝的雙子星7號太空船
太空會合指兩個太空載具,通常其中一個是太空站,抵達同一個軌道,並且距離非常接近(目視距離)時的軌道操縱。
太空會合要求兩個太空載具保持非常精確相等的軌道速度,才能保持兩者間的固定距離。會合後未必會進行靠接,也就是兩者接合在一起使兩者能互連。
太空會合的技術也能用於使太空船降落在重力微弱的天體上。例如要登陸火星的衛星,必須讓太空船與火衛保持一樣的軌道速度,接下來的下降步驟也與太空對接類似。
目录
1 歷史
1.1 首次嘗試失敗
1.2 首次成功會合
1.3 首次對接
2 用途
3 步驟與方法
3.1 會合步驟
3.2 進場方法
3.2.1 V-bar法
3.2.2 R-bar法
3.2.3 Z-bar法
4 參見
5 參考資料
歷史
蘇聯第一次載人太空飛行的東方計劃裡,曾在短時間內從同一發射架,只隔一兩天發射兩個太空船(1962年東方3號、東方4號,1963年東方5號、東方6號)。這兩次火箭的導引系統都將兩個太空船發射至幾乎完全相同的軌道。然而因為東方太空船缺乏軌道操縱的推進器,因此無法達成會合。雖然一開始兩者間距離僅有5至6.5公里,但後來逐漸漂離至數千公里遠。
1963年,日後成為阿波羅登月太空人的伯茲·艾德林提交了博士論文,題目為載人軌道會合的視線導引技術 (Line-Of-Sight Guidance Techniques For Manned Orbital Rendezvous)
[1]
作為NASA太空人,他"將複雜的軌道力學翻譯成平易近人的飛行計劃給我的同僚看"
[2]
首次嘗試失敗
第一次太空會合的嘗試發生在1965年6月3日。美國太空人詹姆斯·麥克迪維特試著操作雙子星4號太空船與已使用完畢的泰坦火箭2型火箭會合。但因距離感的問題,還有火箭因推進劑排氣而不斷移動的問題,他無法靠得更近也無法保持位置。[3]
最主要失敗的原因,是當時NASA工程師並不了解會合時所需要的軌道力學。
僅僅只將太空船指向目標再推進,並無法達成會合。如果目標在同一個到的前面,後者增加速度則會同時提升高度,反而遠離目標。
正確的做法是改變追逐者的軌道,讓會合的目標追上或被追上,然後再移動到同一軌道使得兩者相對速度為零。
[4]
.mw-parser-output .templatequote{margin-top:0;overflow:hidden}.mw-parser-output .templatequote .templatequotecite{line-height:1em;text-align:left;padding-left:2em;margin-top:0}.mw-parser-output .templatequote .templatequotecite cite{font-size:small}
雙子星計劃工程師André Meyer後來評論, "會合發生的錯誤有個很好的解釋" 太空人就像任何一個在林顿·约翰逊太空中心的人一般,"完全無法了解軌道力學的作用。因此,我們全都變得很聰明而且將太空會合機動臻至完美,後來阿波羅計劃就用上了。"
——[4]
首次成功會合
第一次成功的會合由美國太空人華爾特·舒拉在1965年12月15日達成。他將雙子星6號移動至姐妹船雙子星7號旁僅僅1英尺(30公分)。
太空船並無對接設備,但足足保持固定位置達20分鐘。
首次對接
首次有兩艘太空船對接是發生在1966年3月16日,雙子星8號在尼爾·阿姆斯壯的指揮下與無人目標太空船會合。雙子星6號原本會是第一次對接,但該次任務所需的目標太空船發射失敗,所以對接計劃取消。[5]
蘇聯在1967年10月30日使用Cosmos 186及Cosmos 188太空船進行了第一次自動無人對接。
[6]
第一位嘗試手動對接的蘇聯太空人是Georgy Timofeyevich Beregovoy,他在1968年10月將聯盟3號與無人的聯盟2號對接卻失敗。他將太空船間的距離從200公尺降到僅僅1英尺(30公分),但在用盡機動燃料前來不及對接。
蘇聯第一次成功的載人太空船對接發生在1969年1月16日,聯盟4號與聯盟5號對接,並交換兩位太空人組員。
第一次兩個不同國家的太空載具對接發生在1975年6月17日,在阿波羅-聯盟測試計劃中,阿波羅太空船與一艘聯盟號太空船對接。
第一次多重對接發生在1978年1月,聯盟26號與聯盟27號都與禮砲6號太空站對接。
 雙子星8號目標太空船 |  雙子星8號與目標太空船在1966年3月對接 |
用途
2011年12月 Soyuz TMA-03M在低地軌道與MRM-1 Rassvet對接,運送三位太空人至國際太空站
每次太空船要將太空人或補給送上太空站時,就需要進行太空會合。第一次與太空站的會合發生在1971年6月7日由聯盟11號太空船與禮炮1號會合。載人太空任務已成功與6個禮砲太空站,天空實驗室,和平號及國際太空站會合過。目前聯盟號大約每六個月運送太空人上下國際太空站。
步驟與方法
標準的會合及對接技巧是讓一個主動的太空船接近一個被動的目標。這技術已經成功展示在雙子星,阿波羅,阿波羅/聯盟號,禮砲號太空站,天空實驗室,和平號,國際太空站及神舟等太空計劃中。
會合步驟
太空會合由一個主動的追逐者太空載具以及一個被動的太空載具組成,可以分成幾個階段,通常始於兩個太空載具位於不同軌道,距離超過1000公里遠:[7]
| 階段 | 距離 | 此階段一般時間長度 |
|---|---|---|
Drift Orbit A (視線之外,無接觸) | >2 λmax[8] | 1 至 20 天 |
Drift Orbit B (視線接觸內) | 2 λmax to 1公里(3,300英尺) | 1 至 5 天 |
近接操作 A | 1,000~100米(3,280~330英尺) | 1 至 5 orbits |
近接操作 B | 100~10米(328~33英尺) | 45 – 90 分鐘 |
對接 | <10米(33英尺) | <5 分鐘 |
有很多種太空船操作技巧可用於進行平移,轉動的機動以作為近接及對接操作。[9]
進場方法
V-bar法
R-bar法
Z-bar法
參見
- Androgynous Peripheral Attach System
- 共用靠泊機制
- 月球軌道交會
- 節點歲差
- Path-constrained rendezvous
參考資料
^ Buzz Aldrin. Orbital Rendezvous.
^ Buzz Aldrin. From Earth to Moon to Earth (PDF). (原始内容 (PDF)存档于2014-05-27).
^ Oral History Transcript / James A. McDivitt / Interviewed by Doug Ward / Elk Lake, Michigan – June 29, 1999
^ 4.04.1 Gemini 4. Encyclopedia Astronautica. (原始内容存档于2010-11-29).
^ http://nssdc.gsfc.nasa.gov/nmc/spacecraftDisplay.do?id=GEM
^ NSSDC ID: 1967-105A NASA, NSSDC Master Catalog
^ 引用错误:没有为名为wertz2003的参考文献提供内容
^ λmax is the angular radius of the spacecraft’s true horizon as seen from the center of the planet; for LEO, it is the maximum Earth central angle from the altitude of the spacecraft.
^
Lee, Daero; Pernicka, Henry. Optimal Control for Proximity Operations and Docking (PDF). Int’l J. of Aeronautical & Space Science. 2010, 11 (3): 206–220 [November 3, 2011]. Bibcode:2010IJASS..11..206L. doi:10.5139/IJASS.2010.11.3.206. (原始内容 (PDF)存档于2012年3月31日). 引文使用过时参数coauthors (帮助)
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||













|



Comments
Post a Comment